SolidWorks Modeling
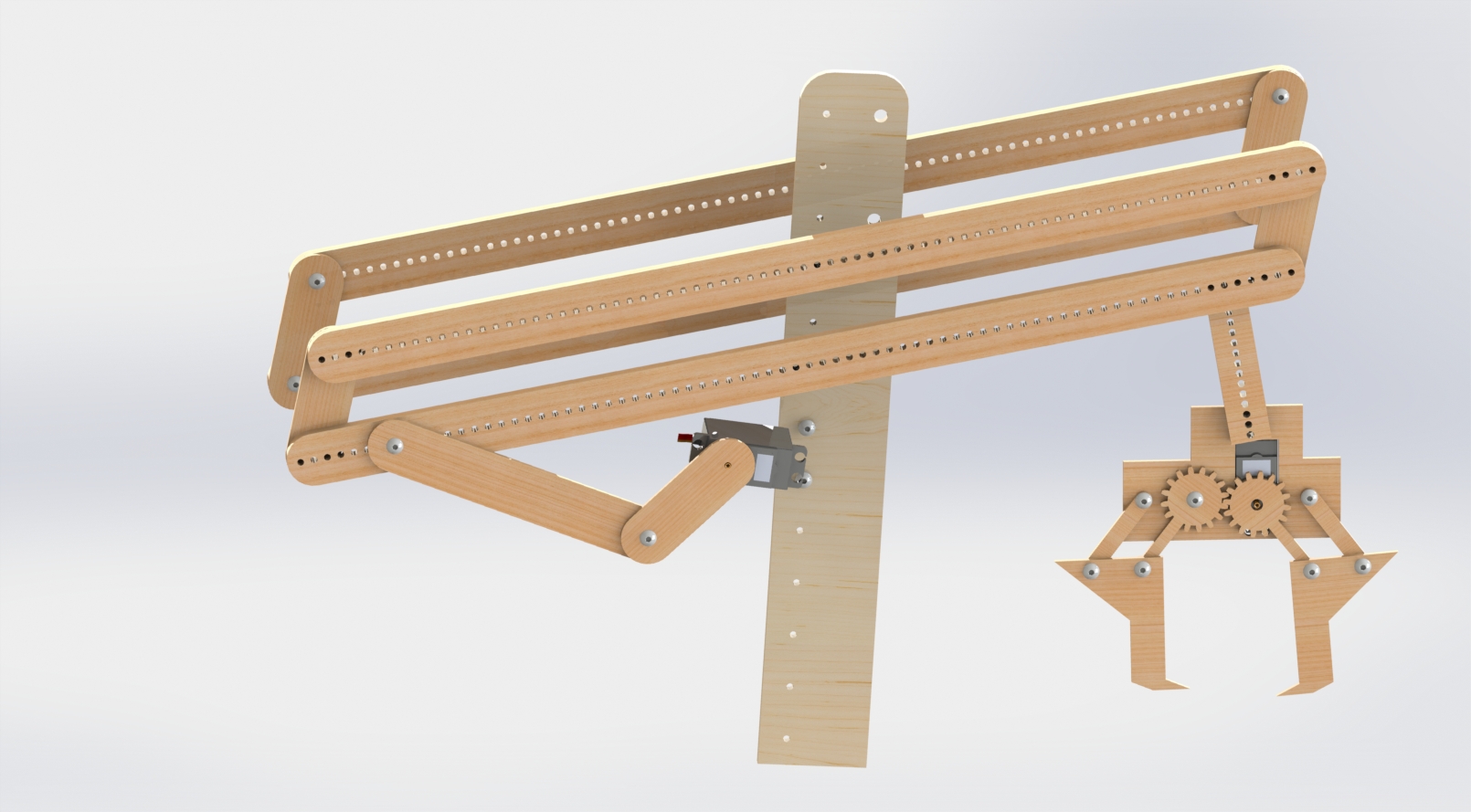
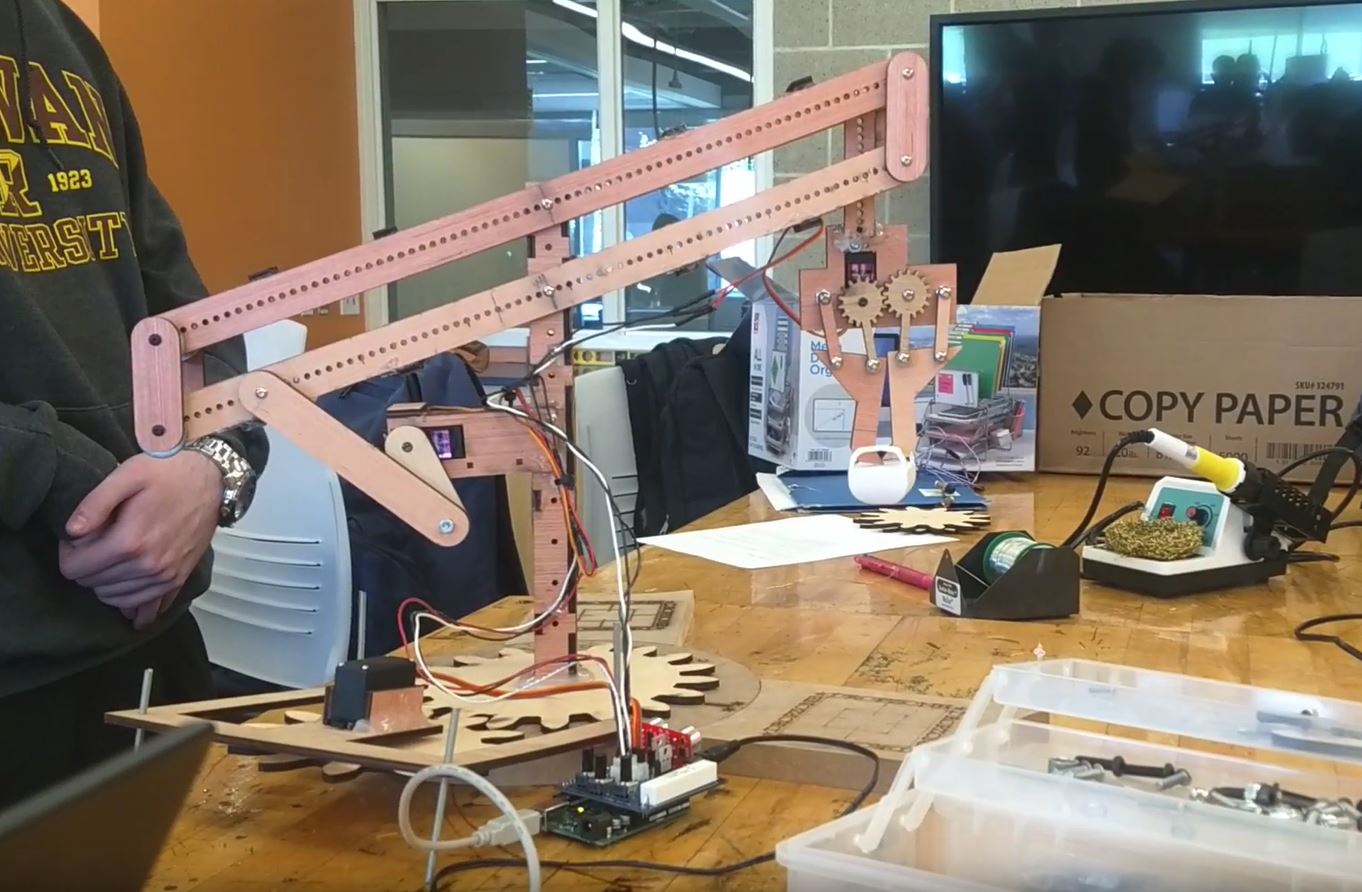
The project was split into to three deliverables: the claw gripper, the claw lifter, and
the claw base rotation mechanism. The claw gripper and the claw lifter were both actuated by
a servo controlling a four-bar linkage mechanism, and the rotation mechanism was comprised
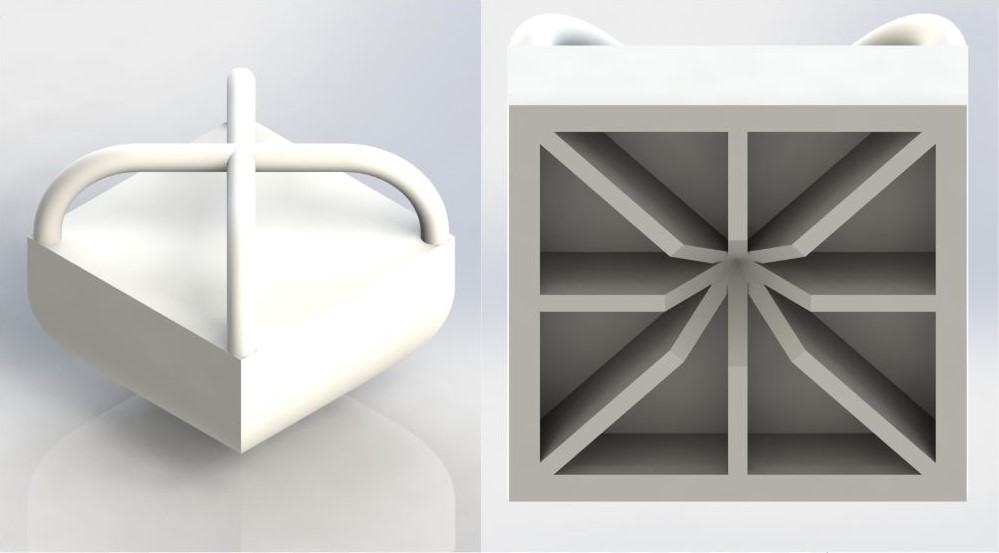
of two gears also controlled by a servo motor. The rotation mechanism was designed around
a tower that was comprised of four parts. For the tower, my team and I came up with a
puzzle piece design of 4 rectangular walls that we epoxyed together to assemble.