Skills: 3D Printing, Machining
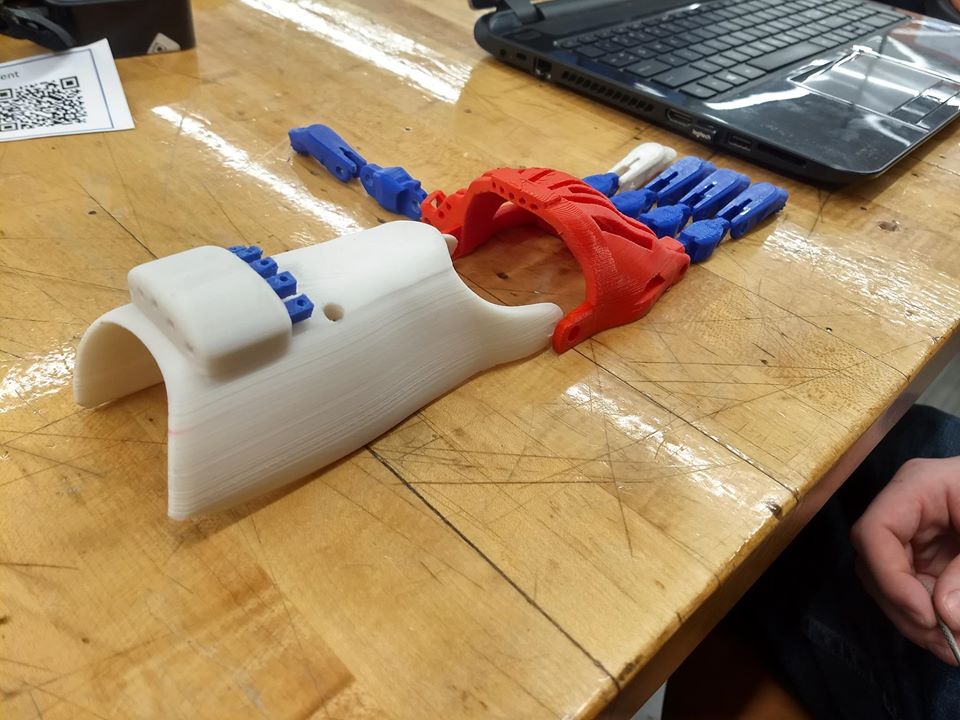
For this project, I worked alongside one other teammate to fabricate two prosthetic hands.
The original goal of this project was to serve as a proof of concept demonstrating the
ease and time-saving approach of 3D printing hands. One of my former professors hopes to
expand this project further in the near future by having us fabricate an open-source hand
model from the e-Nable Foundation for a friend's daughter who is missing a portion of her
top hand. The open-source hand models my teammate and I printed lack a CAD model and were
only available in an stl format. While this format can be manipulated in a software like
Blender to allow for user customization, I'm currently researching to develop my own
open-source hand model that can be manipulated in an easier way.
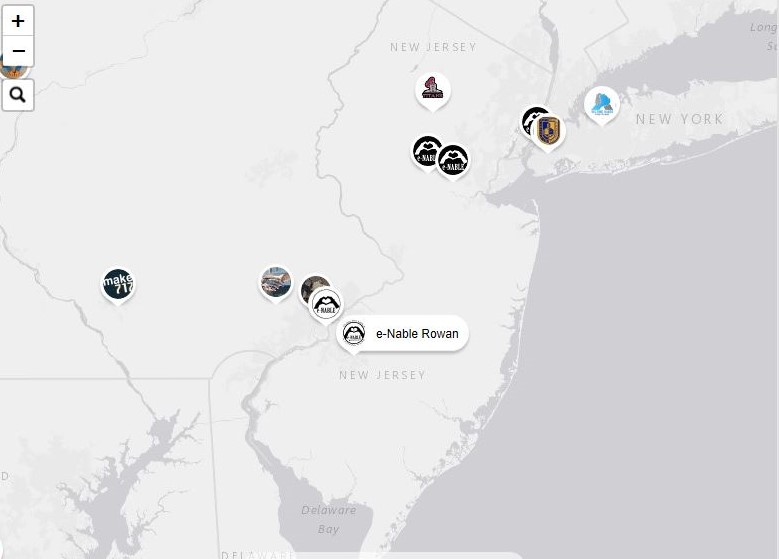
First South Jersey e-Nable Chapter
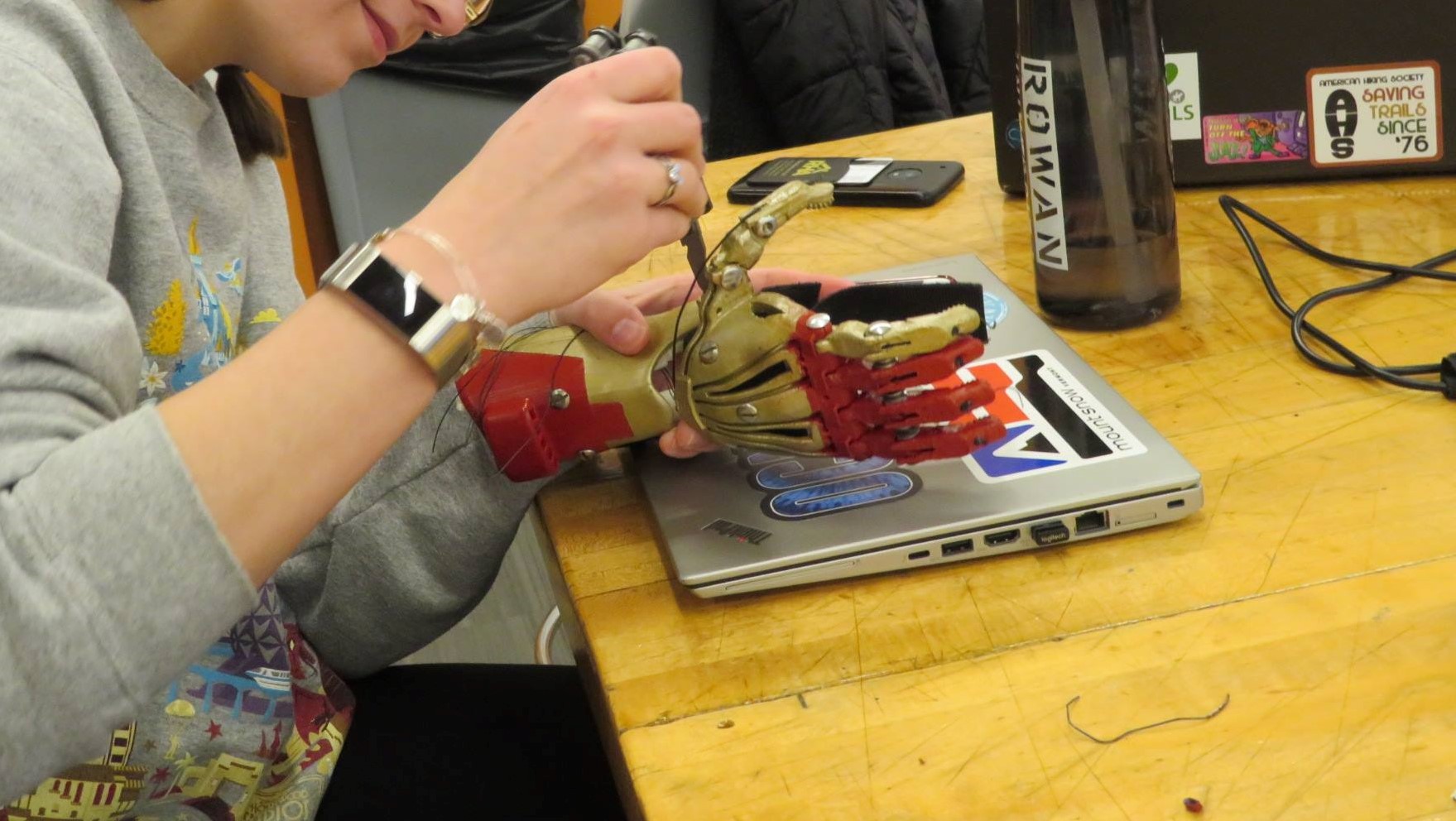
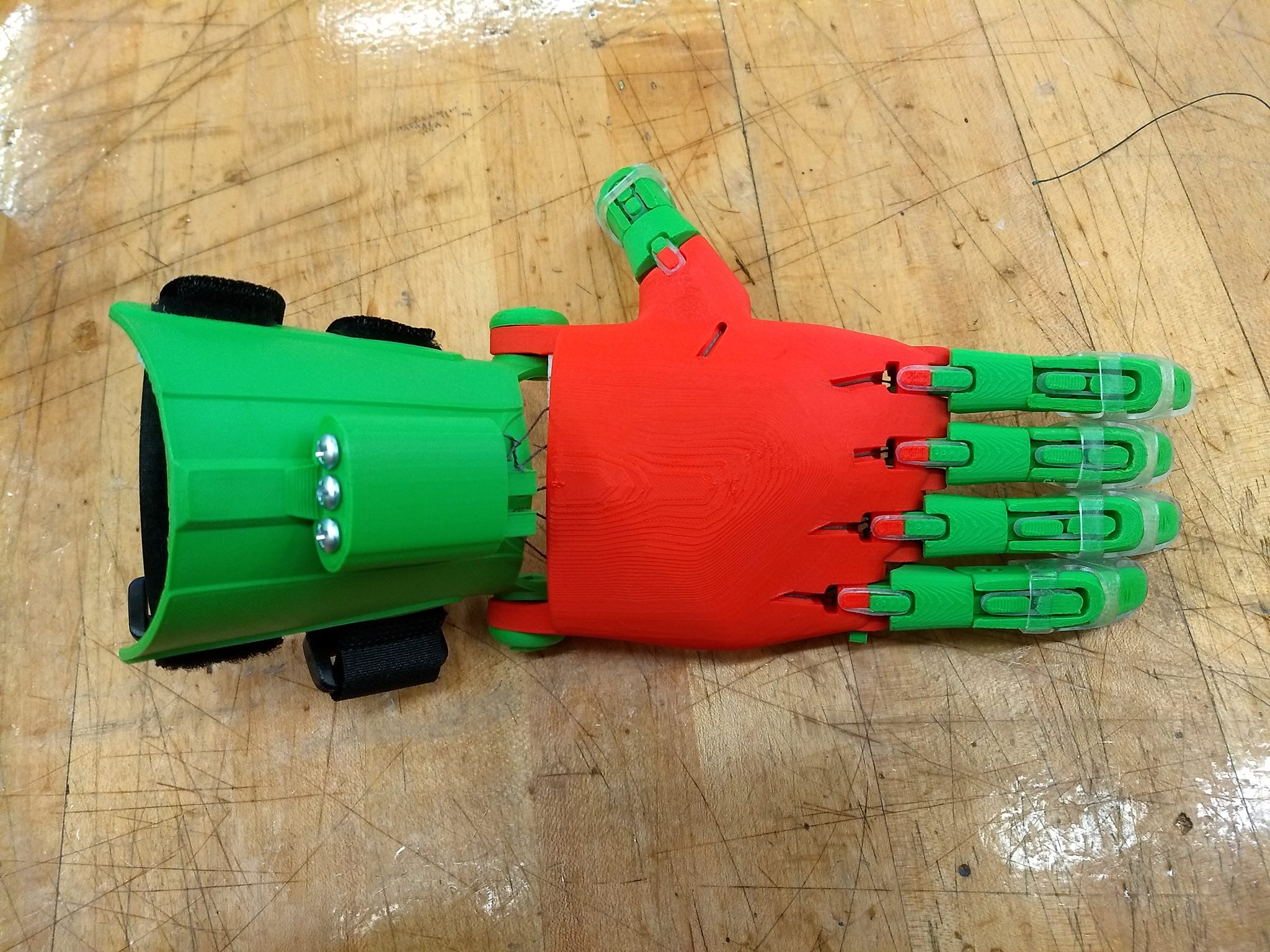
After my teammate and I finished assembling our hands, we presented our Phoenix Hand
and Cyborg Beast devices to the e-Nable Foundation to obtain Fabrication and Assembly Certification
Badges for both hands. With the approval from Rowan University and a faculty advisor, we
were able to set up an e-Nable chapter at Rowan. Since my former teammate had graduated,
in my final year at Rowan University, it was my responsibility to guide interested students
on the fabrication and assembly process of the Phoenix Hand model. This gave me the chance
to improve my skills by teaching someone else and pass on the torch to younger students who
will continue to produce hands for patients in need.